
花几个小时就能体验另一种人生,
新冠肺炎疫情牵动着亿万国人的心
撰文|夏一哲编辑|常亮在“万物
【环球网智能报道 记者 张阳】
2024华为软件精英挑战赛季军赛队心路历程分享
日前,2024第十届华为软件精英挑战赛-“普朗克计划”全球总决赛及颁奖典礼圆满落幕。11支优秀队伍凭借优异表现分享了68万元总奖金池。
其中,武长赛区来自华中科技大学的“明天组会吃烧烤还是火锅”队获得全球总决赛季军。来自华中科技大学的优秀选手陈梦雷撰文分享其赛队参赛体验,包括参赛初衷、解题思路及方案、比赛收获等。

一、参赛初衷
今年决定参加软挑主要是想找个有趣的事情做做,重新找回写代码的动力。平时做研究比较枯燥,也很难有正反馈,甚至反馈都很慢。看了下今年赛题,感觉很有意思,就决定来参与下。
二、初赛阶段思路
初赛阶段地图属性相对简单(只有空地、海洋、障碍物、以及港口),且不需要考虑船的路径规划。主要的设计可以分为如下几个模块:(a)机器人路径规划(b)机器人碰撞避免机制(c)机器人运货策略(d)船运货策略。
机器人路径规划。我们采用简单的bfs来实现机器人路径规划。dis(x,y,tx,ty)和direct(x,y,tx,ty)分别表示某点(x,y)到目标点(tx, ty)的距离和下一步应走的方向。为了减少空间开销,我们要求起点(x,y)是有效点(即空地和港口),同时要求终点(tx,ty)是港口或者货物生成点。为了减少时间开销,我们只在选择物品后,才以该货物生产点为(tx,ty)进行一次bfs。
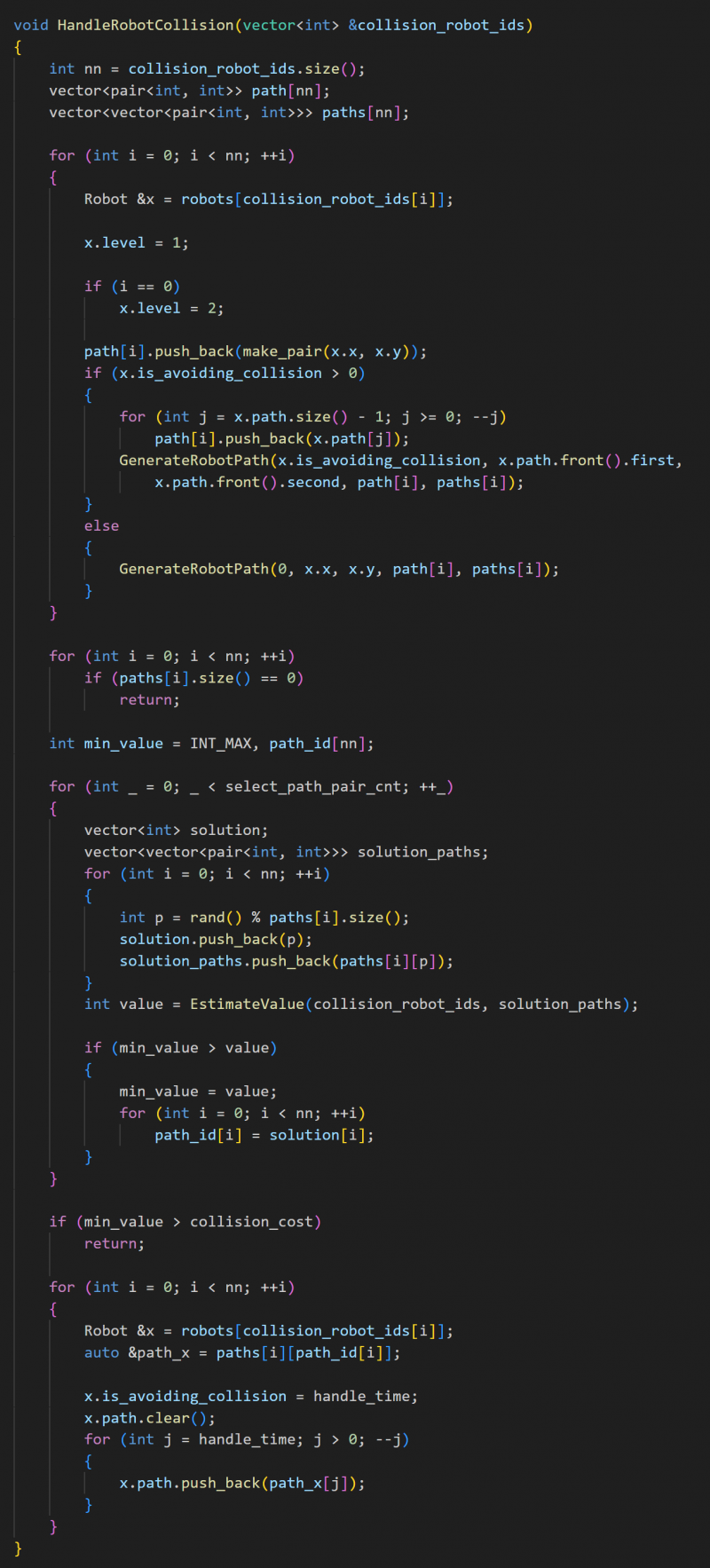
机器人碰撞避免机制。具体而言,每个机器人生成detect_time长度的未来路径,这个路径就是没有碰撞情况下这个机器人预计走的路径。根据这个未来路径,可以判断机器人A和B是否会碰撞。这样可以得到若干机器人集合,任意集合内的机器人会至少和另一个集合内机器人碰撞。我们分别对于每个集合进行碰撞避免处理。对于某个集合,我们对集合内每个机器人生成handle_time长度的合法路径(即不与障碍物或者海洋发生碰撞)。然后采样若干次,每次采样对集合内每个机器人随机选取一条刚刚生成的合法路径,然后对这一次采样选取的路径集合进行估值。估值函数需要满足:(a)碰撞惩罚很大(b)对于机器人和目标点距离,根据机器人优先级加权求和。最后,选取估值小的路径集合,强制机器人在后续handle_time步按照所生成的路径行进。注意我们每一帧都可以检测碰撞和处理碰撞,所以这种处理方式其实是比较动态的。下列代码展示了碰撞处理函数:
机器人运货策略。初赛阶段我们尝试了很多种运货策略,这里介绍我们最终初赛正式赛所采用的策略。我们先将每个货物归属到最近的那个港口,然后按照value/send_time排序,这里send_time指货物生产点到所归属港口的距离。然后对于每个机器人,我们也会将其归到一个港口。处于空闲状态的机器人就会选取对应港口优先级最高的货物去搬运。每个机器人会存储一个plan_to_work_time,表示会在plan_to_work_time之前都归属在当前港口。当过了plan_to_work_time,就要重新选择一次工作港口。我们定义港口吞吐率,即该港口总货物价值除以当前时间。我们枚举每个港口,三分枚举机器人在这个港口预计归属时间t,分别计算加入这个机器人和不加入这个机器人两种情况下港口在t时刻的吞吐率,选取吞吐率差值最高的港口以及归属时间。因为我们某个港口的机器人选取货物是固定顺序的,吞吐率的计算就是模拟即可。
船运货策略。我们定义船的吞吐率,即最终船运输的货物总价值除以这一趟运输的总耗时(从虚拟点出发到回到虚拟点的时间)。和机器人类似,我们也为每个船存储一个plan_to_load_time,表示在plan_to_load_time之前都会前往并停留在目标港口。每当一艘船到达plan_to_load_time时,有如下方案:(a)回虚拟点(b)前往另一个港口并停留若干时间。我们会选择使船吞吐率最高的方案。选择港口时,我们会假设前往这个港口后就会直接回虚拟点,从而计算对应船的吞吐率。
总的来说,初赛阶段我们并没有使用复杂算法,也并没有针对地图优化(除去调参),因此我们练习赛最终排名只有23名,正式赛也只排在15名。但正是因为我们所实现的策略比较通用,后续比赛阶段能比较好地利用初赛的各种策略,不需要进行太大的重构。
三、复赛阶段思路
复赛增加了船的路径规划,并且增加了许多地图属性(比如主干道、主航道)。但是我们的设计框架并不需要很大修改就能使用。相比初赛,复赛阶段我们只进行了如下修改:(a)船的路径规划(b)船的碰撞避免机制(c)修改船的运货策略(d)购买策略。
船的路径规划。和机器人的路径规划类似,我们使用bfs进行路径规划。sea_dis(x,y,d,tx,ty)和sea_direct(x,y,d,tx,ty)分别表示某点(x,y,d)到目标点(tx, ty)的距离和下一步应做的操作。同时只需实现港口间和港口到交货点之间的路径规划即可。
船的碰撞避免机制。和机器人一致,只需修改未来路径生成、合法路径生成以及估值函数部分。
船的运货策略。和初赛阶段大体一致,只不过每次可规划涉及多个港口的安排,称为一个trip。以涉及三个港口{A,B,C}的trip为例,其表示这样一个安排:(A,tA)->(B,tB)->(C,tC)->交货点,tA、tB、tC指对应的plan_to_load_time。这里我们也是基于采样的方法,来选取使船吞吐率最高的trip。
购买策略。我们只分别对机器人和船设置了最大购买数量,且一开始只买一艘船,等机器人买到最大数量时,才把后续船买完。这样静态的方法其实还可以,假设某个动态方法最后买了若干机器人和船,这些机器人和船肯定越早买越好。另外,购买地点我们只是选取过往购买次数最少的地点购买,尽可能使机器人平均分布。
复赛到最后前十名差距都不算大,能进入决赛说实在还是有些看运气的。
四、决赛阶段思路
决赛阶段所涉及的改动很大。所有队伍都在同一个地图上跑,这就自然而然引入博弈相关的策略涉及,同时需要处理对场面信息的更新。对于每个指令,都要保证其生效后才能进行相应状态更新。大模型问答也很有意思,不过我们认定大模型问答不是主要矛盾,可以后续再优化。这里先介绍决赛我们分析的博弈思路,然后介绍基于博弈思路的各项策略。
博弈思路
首先根据规则,分析观察得决赛有如下特点:
所有队伍都在一张地图上跑,由于各项资源有限,队伍之间是竞争关系。最直接的想法是保留复赛的各项策略,即机器人和船都会选择性价比高(对我们来说就是吞吐率高)的方案。但是复赛的各项策略都是含有对未来的预测和估算,这在决赛中是难以成立的,因为大部分机器人和船的行为都是不受自己控制的。同时,决赛机器人和船之间存在激烈竞争,比如对于高价值货物,一个高价值货物,必须派最近的机器人去抢,而这从全局调度来看,吞吐率可能不是最高的。同样地,由于泊位有限,船离港去交货点回来后,可能就无法占据到泊位了。
货物需要快速变现,前期积累的优势在后面有放大效应。所有队伍初始资金都是25000块,如果某个队伍A能在1000帧把货物变现并赚25000块,这个队伍相当于是两个1000帧才开始的队伍,对于前期没有取得这种优势的队伍B来说,这就是“正义的二打一”。假设后面A和B的行为相同,就仅仅因为前期这一优势,就能使A比B高出接近一倍的分数。
泊位的垄断会导致零和博弈。比赛最后阶段,自己处于装载状态的船可以一直占据泊位,不让别的船进入,到最后再离开,可以认为是一种对泊位资源的封锁。对于每艘船的最后一趟而言(即认为离港交货后无法占据到泊位),执行这样的封锁策略是基本不会有损失的。但是如果有多个队伍执行这种策略,队伍互相之间的博弈会导致封锁时间提前。具体而言,假设所有队伍都是17000帧开始封锁泊位,如果自己在17000帧之前没进行封锁,即离港去交货,那么回来时是占据不到泊位的。因此,自己必须提前进行封锁。所以,泊位封锁时间会越来越早,最终甚至可能一开始大家第一艘船占据港口后就不能离开,根本无法变现。
策略设计
基于以上分析,我们修改了几乎所有策略,包括机器人货物选取和目标港口的选取、船选取港口、离港的策略、购买策略。
机器人和船的协同策略。机器人的货优先交给自己的船。我们会标记1-2艘自己的船,机器人的货优先交给这些被标记的船。虽然这样机器人可能需要多走几百帧的路才能把货物交到港口,但是这样能快速装满一些船,从而尽早变现。如果交给别人的船,就不确定别人何时交货,且货物价值要分一半给别人。
机器人货物选取策略。(a)优先选取高价值货物。当发现高价值货物时,安排最近的机器人去抢,这个我们是通过交换机器人目标货物来实现的。当没有高价值货物时,机器人会前往地图上预先设置好的巡逻点,到达巡逻点后,就可以按照优先级选择低价值货物。这可以让机器人在地图上游荡,更加可能抢到高价值货物,同时也会搬运少许低价值货物来保证基本的收益。(b)每一帧都重新选择目标港口,优先去最近的被标记的自己的船,如果没有,就优先送往有船且其loaded_num大的港口,争取尽早变现。
船选取港口策略。优先选取空港口,空港口就选最近的,能尽快抢到。另外,我们限制了船选取港口的距离,离船当前位置太远的港口就不考虑了,因为大概率抢不到。假设没有合适的空港口,就得排队等待。优先去自己船占据的港口等待,这样能尽量减少和别人船去抢泊位。如果当前港口都是别人的船,就去loaded_num大的港口,因为可能会更早离开。
船离港策略。对于第一艘船,我们限制其停留时间,且当装了足够价值货物时就让其交货,尽早变现。后续的船都是简单地装满了才离开。然后我们设置了封锁港口的时间,当过了这个时间,船即使装满了也不会离港。
购买策略。我们设置了机器人和船的购买比例(6:1),然后根据场上机器人数量限制自己的购买数量,避免边界效应。比如,当场上机器人数量超过1000个时,我们就停止购买。
尽管我们分析了很多博弈思路,并设计了基于博弈思路的各种策略,但正式赛的情况是我们未曾考虑到的。有很多队伍,基础的策略都没有调试好,也完全没考虑这些博弈,比如很多队伍机器人还是送到最近的港口。这就使得正式赛中,采用复赛中性价比策略的船能快速捡取空港口的高价值货物,进而飞快变现。我们了解到前期有采用这种策略的队伍就只有三只,而这三只队伍就是前三名的队伍。
五、总结
由于之前有参加软挑的经验,这次我们在设计上强调了策略的稳定性和鲁棒性,也确实效果不错。初赛和复赛阶段,我们只各花了一周左右的时间实现和修改,在取得不错效果和排名之后,没有进一步针对地图优化,因此练习赛排名都不在最前面。但是正式赛排名都轻松比练习赛高出一些,我们认为这归功于我们仅考虑通用策略,并没有对地图过拟合。
决赛过程其实并不顺利。我们练习赛上遇到字符串编码问题,查了很久bug才解决,这里也非常感谢赛题组老师们耐心解答我们的问题,这也使得我们最终能解决这个问题。另外在比赛前一天,我们才重新理清思路,重构了所有策略,并找出了之前的多个bug。决赛当天看到性价比策略具有重大优势时,试图重新加回去,但是一直没改好,有bug,最终选择提交了旧版本。发生这种情况也是因为版本管理没做好,之前觉得性价比策略在决赛博弈环境中作用有限,就去掉了,正式赛想重新启用就比较困难。我们后面和其他队伍交流发现很多队伍的情况也都和我们一样。还是应该多考虑可能发生的情况,把不同策略设置成可开关选项。
总的来说,这次软挑体验不错,赛程安排也合理,尽管还是有些久,但是确实没法再压缩了。非常感谢赛题组老师还有各个工作人员的付出,同时感谢武长赛区工作人员对我们的关心和鼓励,让我们能安心体验比赛,收获这次难忘的经历。
推荐阅读:旗龙